LEÓN GEMELO DIGITAL
RESULTADOS
Archivos
Archivos necesario para el pintado de puntos y la reconstrucción fotogramétrica
Puntos
Número total de puntos LiDar
Puntos/m2
Densidad de puntos
Metros
Altura del vuelo hasta el punto más alto de la catedral
resultados
Procesado de datos
Procesamiento del LiDAR
- El LiDAR
- La fotogrametría
El DJI TERRA es un programa muy sencillo creado específicamente para procesar los datos procedentes de sus sensores. La forma de trabajar con este software es:
- Tiempo de procesamiento: 9 horas 15 minutos.
- Error de trayectoria de IMU: X = 0.00657 m, Y = 0.0592 m, Z = 0.00617 m.
- Densidad de puntos: 1708 puntos/m2.
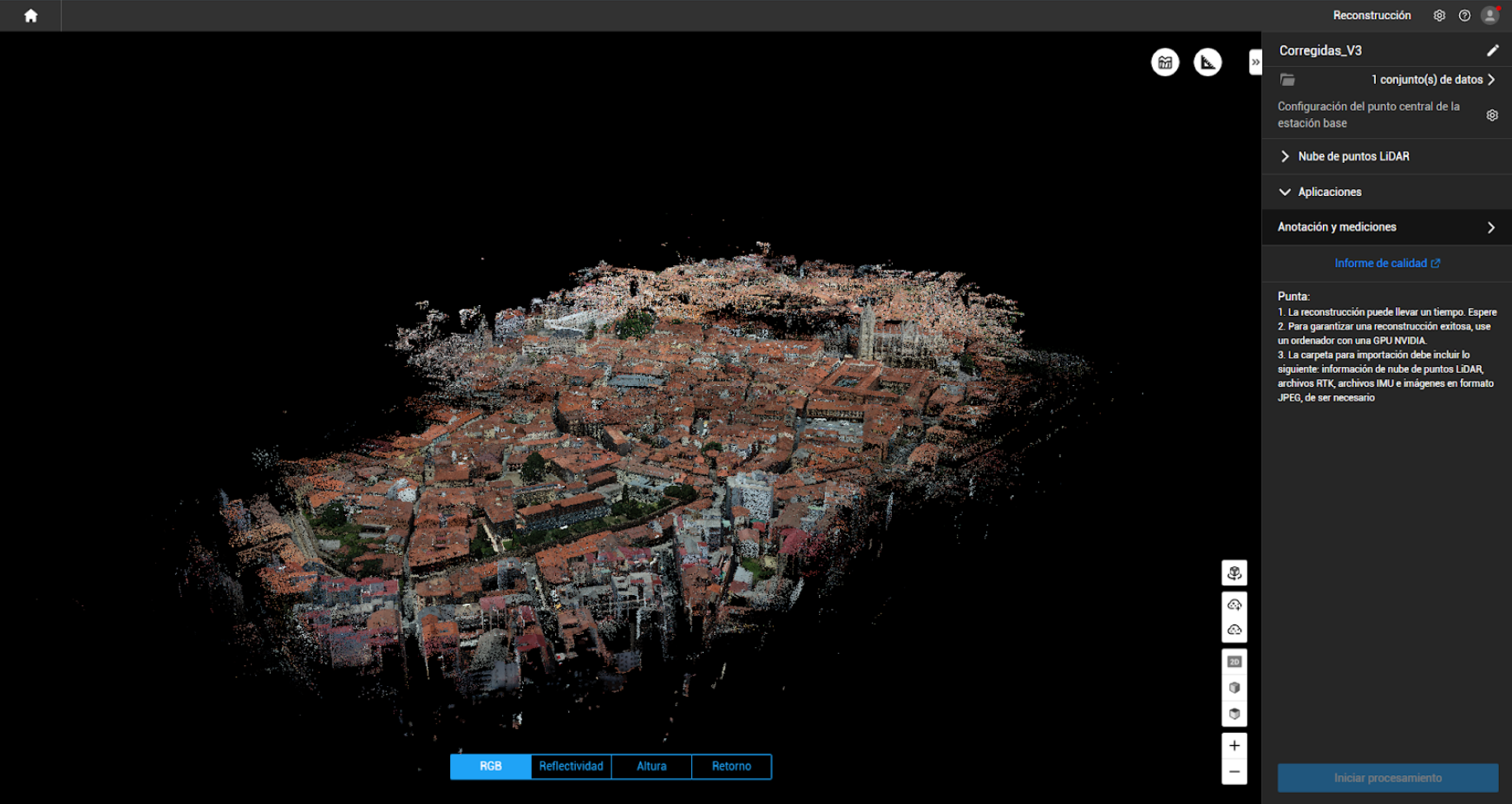
De esta forma se obtienen los datos brutos. Es decir: la nube de puntos sin procesamiento y con información únicamente del posicionamiento de cada punto.
Ahora pasamos a procesarla de cara a obtener los datos derivados que nos interesen (importante recordar que a través de esta web se puede obtener la nube de puntos original lo que ofrece, a cualquier usuario, la posibilidad de procesarla como uno prefiera).Primero se hace una revisión de los datos, ya que es normal en nubes de puntos encontrar datos extremos o “outliers”. Estos son puntos que se han tomado por error ya sea por fallo de GPS o porque el pulso láser rebotó, por ejemplo, con un pájaro. En este caso, esta corrección se hizo de dos pasos:
- Primero, eliminando los puntos que estaban por debajo de 0 m y por encima de 68 m (punto del edificio más alto). Esto se realizó, en primera instancia, a partir del uso de herramientas del programa FUSION, para luego, y ya de forma manual, revisar los posibles restantes puntos que se encontraban por encima de las casas a través del manejo del programa CloudCompare.
- Segundo, generando un perímetro a mano con el fin de recortar la nube de puntos y eliminar el efecto borde, ya que estas son zonas con una densidad más baja de puntos y, por tanto, nos podría generar inexactitudes a la hora de obtener los datos derivados.
Nube de puntos LiDAR (Pintado de elevaciones)
Una vez se ha limpiado y preparado la nube de puntos, se extraen los datos.
En el caso del análisis que se está presentando, se han extraído las alturas de los edificios a través del programa FUSION. En concreto se generan dos capas raster (una capa raster es una sucesión de píxeles colocados en forma cuadrícula). En función del tamaño de la capa el raster tendrá más o menos píxeles y cada píxel representará un valor, en este caso un valor de altura.
Respecto a las capas obtenidas en este análisis, debido a la densidad de puntos disponible, se optó por generar y extraer capas con gran precisión (0,25 m). En concreto se extrajo:
- Un Modelo Digital de Terreno (MDT), que representa la altitud del terreno sobre el nivel del mar (representación del modelo del terreno eliminando cualquier elemento superficial, por ejemplo los edificios).
- Un Modelo Digital de Superficie (MDS), que representa la altitud del terreno + los elementos disponibles en la superficie con respecto al nivel del mar (en este caso es como si a la ciudad le pusiéramos una sábana encima y nos quedaremos con la forma que esta muestra. Es decir: ofreciendo detalle sobre el relieve de los edificios, monumentos, árboles…)
DTM Casco Histórico.
DSM Casco Histórico.
Con las capas anteriores (MDS y MDT) se hace una resta: esto es posible ya que el tamaño de píxel es el mismo y, como explicamos anteriormente, los píxeles tienen valores altitudinales.
Entrando en más detalle, lo que se hace en este punto es restar esos valores respetando el siguiente orden:
- MDS – MDT
Esta operación permite obtener los datos reales de las alturas de los elementos existentes en el territorio: edificios, árboles, y/ó monumentos entre otros.
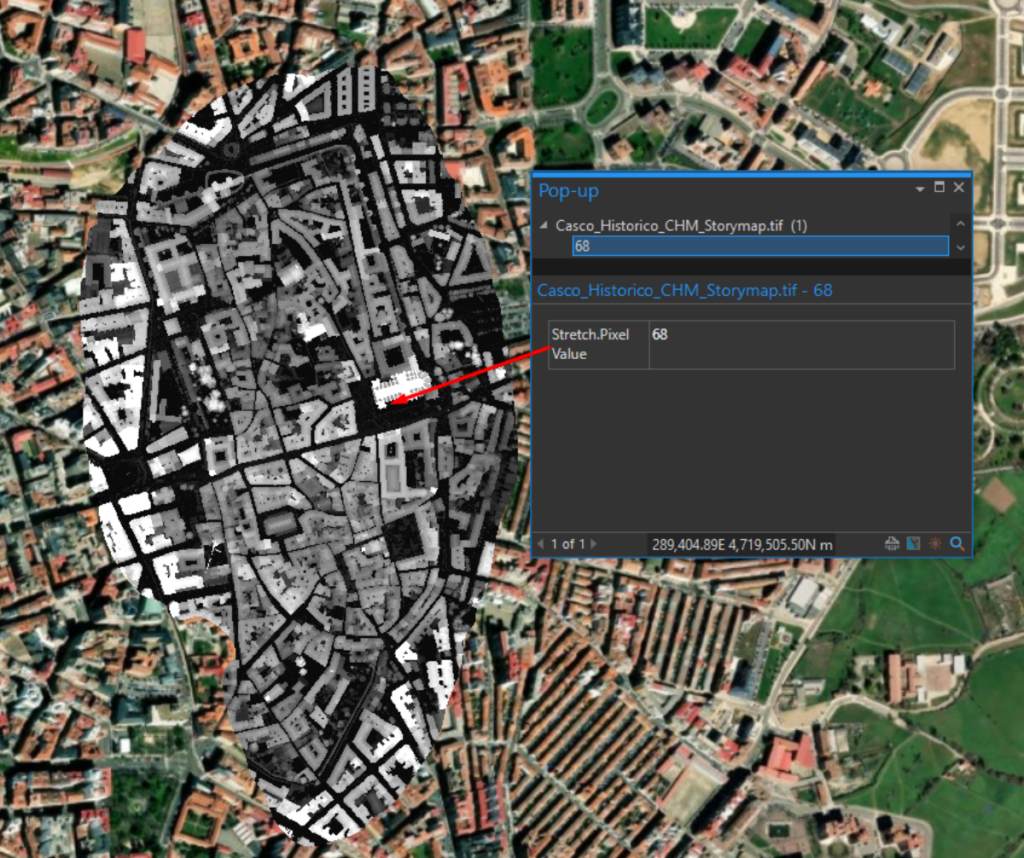
Valor del píxel en la torre más alta de la catedral, representando la altura de esta.
Modelo Digital de Elevaciones (MDE)
Procesamiento fotogramétrico
Por otra parte, todas las imágenes que obtiene el sensor LiDAR en el proceso de captura de la nube de puntos de color real (RGB) son aprovechadas para hacer un trabajo de fotogrametría.
La creación/generación del mapa por ortofotos se realiza a partir del reconocimiento de los objetos en diferentes imágenes, lo que anteriormente vimos como solape. El programa lo identifica y automáticamente por el posicionamiento GPS de las imágenes en el vuelo, va generando un mosaico de imágenes solapadas, que luego perfila y arregla hasta que devuelve como producto en formato de ortomapa. En este caso es de muy alta precisión, siendo el tamaño de píxel de 2 cm.
A modo de curiosidad: algo que se puede observar en la mapa que se presenta en este apartado es que, debido a las condiciones meteorológicas, el día que se voló la parte noroeste del casco viejo de la Ciudad de León hizo más sol que el resto de los días de vuelo y por ello se ve esta zona con una tonalidad más clara (la imagen se encuentra «quemada»).
En la creación del modelo 3D del casco histórico de la Ciudad de León se utilizó la técnica de pares estereoscópicos, que es similar a la técnica de mosaicos: teniendo dos o más imágenes similares y contiguas que se solapan entre sí, es posible crear un efecto visual en 3D de los diferentes elementos existente en el terreno (que en este caso son los edificios de la Ciudad de León).
Este tipo de digitalización ofrece modelos en 3D tan asombrosos como el del centro histórico de la Ciudad de León.