LEÓN GEMELO DIGITAL
CÓMO LO
HICIMOS
Gemelo digital
Preparación del proyecto
Antes de empezar a organizar un vuelo, se recomienda mirar las restricciones más actualizadas de la zona. Puede consultarse aquí: https://drones.enaire.es/
Lo primero que hay que tener para poder realizar este tipo de vuelos es un Título de escenario estándar STS-ES-0, ya que el vuelo se realiza en entorno urbano, y debido a que estamos en zona CTR también hay que tener un Certificado de radiofonista.
Trámites:
- Título de piloto dron (STS-ES-01)
- Título de radiofonista
- Registro como operado
- Manual de Operaciones STS-ES-01 Seguro Civil para el dron
El espacio aéreo del aeropuerto de León pertenece al Ejército del aire y del Espacio, por lo que será necesario solicitar unos permisos muy concretos. Sumado a los permisos relacionados con el tráfico aéreo, en León hay que solicitar también coordinación con el helipuerto del Hospital Universitario de León y los trámites con las entidades públicas que controlan el tráfico aéreo. Trámites:
- Comunicado Ministerio del Interior
- EARO (Evaluación y Atenuación del Riesgo Operacional para la operación con UAS en espacio aéreo controlado por ATSP Militar)
- Solicitud CECAF (Centro Cartográfico y Fotográfico del Ejército del Aire)
- Declaración Operacional (para la Agencia Estatal de Seguridad Aérea (AESA))
- Plan de vuelo (para ENAIRE en el Ministerio de Transportes y Movilidad Sostenible)
También se necesitarán permisos como el de patrimonio para poder volar los edificios pertenecientes a este, así como el permiso de la Iglesia por el mismo motivo. También es necesario solicitar el permiso a la Policía Local, que habilitará una zona de despegue y aterrizaje. Trámites:
- Solicitud de autorización para intervenciones en bienes inmuebles de interés cultural o bienes incluidos en el inventario del Patrimonio Cultural de Castilla y León (Consejería de Cultura y Turismo)
- Permiso de ocupación de vía pública (dirigido al Cuerpo de Policía Local)
- Permiso de vuelo de propiedades el Obispado de León
PROCESO DE TRABAJO
Planificación del trabajo de campo
A la hora de hacer la planificación de los vuelos en gabinete, se optó por realizar misiones conocidas como oblicuas. Son misiones en las que se configuran los parámetros y se hacen los vuelos de forma autónoma. Se escogió este tipo de misión debido a que organiza 5 vuelos sobre el área de la que se desean tomar los datos.
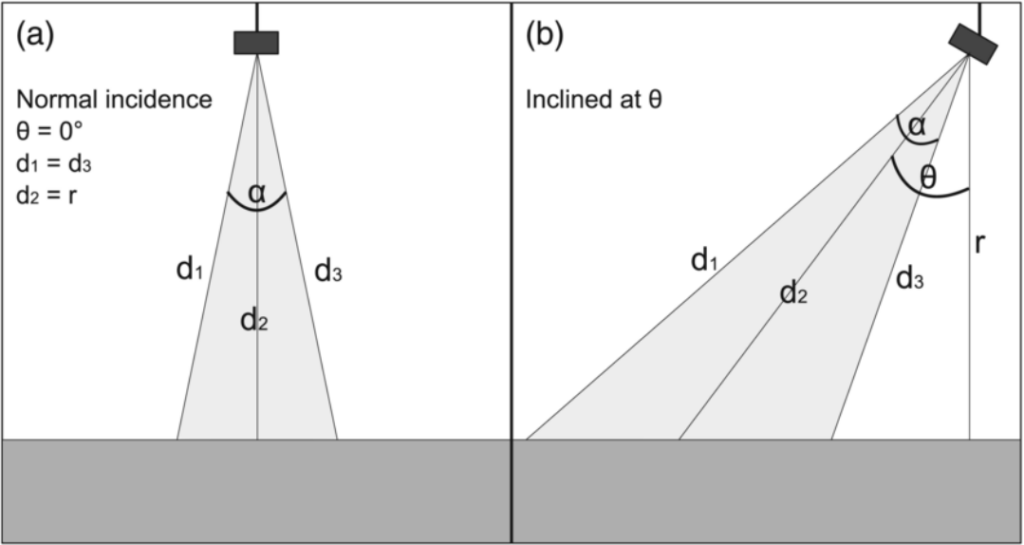
El proyecto consiste en hacer un primer vuelo sobre la totalidad del área dibujada con el sensor en posición cenital (mirando al suelo). Con este primer vuelo nos centraremos en tomar los datos de las superficies que están más o menos perpendiculares al suelo.
Por último, se hacen 4 vuelos más que complementan al anterior. En estos vuelos el sensor se coloca con un ángulo de 45º para poder captar bien las superficies verticales (como las fachadas de los edificios) y dichos vuelos se organizan tomando datos en las cuatro direcciones correspondientes con los 4 puntos cardinales: norte, este, sur y oeste. De esta forma conseguimos un escaneo preciso de todas las estructuras que tenemos en nuestra misión.
El área total volada fue de 450.000 metros cuadrados. Esta superficie se dividió en 20 misiones con el objetivo de poder realizar los vuelos de la forma más segura, sin perder el dron de vista o vuelo VLOS (“Visual Line of Sight”) y también para no perder la señal entre el dron y la consola. Importante decir que debido a la cantidad de edificios, a la altura de estos y el grosor de las paredes de los edificios más antiguos, era muy fácil perder de vista el dron. Por eso se planteó hacer vuelos pequeños en zonas concretas e ir moviéndose a pie por todo el centro alternando numerosos despegues y aterrizajes.
Izq. posición cenital. Drch. posición angular.
Otro parámetro que se ajustó en el sensor fue la cantidad de rebotes necesarios. El LiDAR de DJI Zenmuse L1, puede tener como máximo 3 rebotes, tratándose de la cantidad de veces que puede enviar un mismo punto para ver la frondosidad de un objeto. Aquí realmente no era necesario abordar este análisis ya que el mismo está dirigido a conocer la frondosidad de la vegetación. Sin embargo, aunque no era nuestro objetivo, decidimos obtener igualmente todo el conjunto de rebotes.
La velocidad de los vuelos fue de 5 m/s, velocidad máxima permitida para un vuelo en zona urbana con vuelo de escenario STS-ES-01. Al tratarse de una velocidad muy baja esto permitió capturar una gran cantidad de datos.
Se optó por realizar el vuelo a una altura entre un rango de 70 a 80 metros. Esta altura fue elegida en función del edificio más alto que había en nuestra zona de vuelo. En este caso fue la torre sur de la catedral de León quien marcó esta referencia, llegando a medir 68 metros.
Toda la configuración vista hasta ahora hace referencia a la configuración del dron. Pero junto a esta se debe abordar, de igual modo, la configuración del sensor LiDAR. Para el sensor LiDAR se modificaron los parámetros de solape entre pasadas subiéndolo a un 70%: esto hace que cada pasada que da el dron se solape a un 70% con otras pasadas contiguas generadas en el propio itinerario del dron.
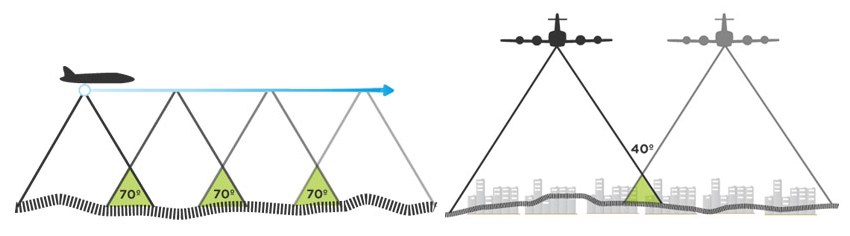
Fuente: https://buenosaires.gob.ar
PROCESO DE TRABAJO
Trabajo de campo
Antes y durante los vuelos siempre estuvo presente un Policía Nacional escoltando y velando para que se cumplieran las leyes. La duración de este trabajo fue de unas 40 horas, trabajo realizado durante 5 días y 100 vuelos.
Para llevar a cabo el trabajo de campo siempre estuvieron involucradas dos personas: el piloto principal y una persona de apoyo, que se encargaba de deambular por las calles sin perder de vista el dron.
Las zonas de despegue y aterrizaje estaban limitadas con unos conos y una cinta. Además, para evitar que curiosos se acercaran también se procuró mantener cerrada la zona de despegue y aterrizaje mediante el uso del coche de la policía así como del coche de la empresa.
Antes de iniciar la actividad, lo primero que hay que hacer, con un máximo de 120 horas (5 días) de antelación, es presentar el plan de vuelo para que la Torre de Control del Aeropuerto de León tenga conocimiento de que vamos a realizar vuelos de dron en ese momento dentro de su espacio aéreo.
Una vez se llega al punto donde se va a despegar, se despliegan los conos y la cinta para delimitar la zona, se enciende el dron y se deja calentar la IMU del sensor LiDAR.
Mientras está calentando la IMU (10-15 min), se realiza la inspección del dron, que incluye la revisión de las hélices, que la estructura no esté dañada, que los brazos estén bloqueados, que las baterías estén cargadas y/o que los paracaídas estén bien anclados. Una vez hecha la revisión, se hace la llamada a Torre del Control del Aeropuerto de León, para indicar quienes somos, donde estamos, a qué altura vamos a volar y cuánto tiempo durará el vuelo. Si el tráfico aéreo lo permite y dan “luz verde”, se procede al despegue (si la IMU ha terminado de calentar).
A la hora de realizar los vuelos, primero despegamos manualmente y cuando el dron está a una altura segura, se envía la misión desde la consola y el dron comienza a funcionar automáticamente. Primero se desplaza hasta la zona de inicio de toma de datos y hace una calibración de la IMU. Esto consiste en ir tres veces hacia delante y tres hacia atrás, en el punto de inicio de la toma de datos para que la IMU coja una buena señal. Y una vez terminada la calibración, comienza la toma de datos.
La duración de los vuelos varían dependiendo del tamaño del área de la misión, en este caso desde 4 minutos en las áreas más pequeñas y 15 minutos en las áreas más grandes.
En caso de que la batería esté a punto de acabarse (siempre dejando un porcentaje de seguridad que asegure la llegada al punto de aterrizaje) se lleva el dron manualmente hasta el punto de aterrizaje y se hace descender. Una vez esté en tierra se llama a Torre de Control para avisar de que se ha llevado a cabo el aterrizaje del dron y que lo mantendremos en tierra hasta nuevo aviso. Se hace un cambio de baterías en “caliente”, es decir, solo se retira una de ellas para que el dron siga encendido con la energía que le aporta la otra batería. Hacerlo así permite mantener el dron en marcha mientras se coloca la nueva batería cargada. Si el dron se apagara perderíamos ubicación GPS (cada vez que se apaga y se enciende, se recalcula la posición) y evitamos tiempo de espera para que la IMU vuelva a calentar.
Cuando ya está todo listo, se vuelve a llamar a Torre de Control antes de despegar, y si dan “luz verde”, repetiremos el mismo proceso, así hasta realizar las 20 misiones.